ABOUT THE CHALLENGE
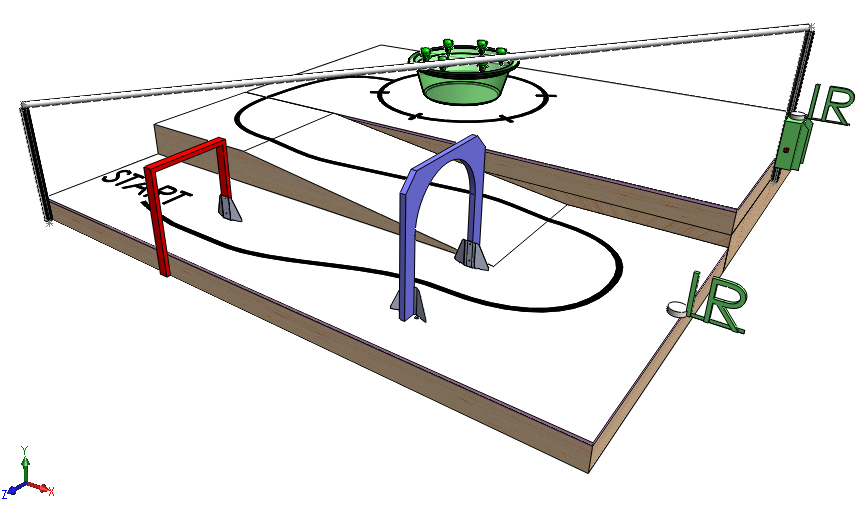
This years competition, "Mission Impossi-bots" features teams driving up a track that traverses both a flat and elevated surface, reaching a containment filled with water. The water containment has location markers indicating where teams can find where the agents are placed. Robots are required to retrieve the agents from the containment, carry them over to the zipline at the edge of the surface and send them back to the entrance to be resuced from the fortress.
In addition to the base task of retrieving the agents, the robot has to pass an armed door at the beginning of the track that indicated whether or not it is armed by emitting a 1kHz or 10kHz signal. The robot is allowed to pass through this once is has identified that the door has been disarmed. The agents also start to fall into the water inside the containment after the 60 second mark. Agents will fall in once every 10-15 seconds, making retrieval more challenging. To identify the location of the zipline, and infrared radiation beacon emits a signal. The robot must be able to consider all incoming signals and drive along the path autonomously.
Detailed information about the competiton rules can be found here