The Premise
Our arm design underwent many changes throughout the design cycle. Initially, we opted for a 3-axis arm that was free to move in all three dimensions. However, we found that testing and debugging this solution could be potentially problematic, so we limited our arm freedome to a single axis and opted for a "chopstick" design.

INITIAL DESIGN: THREE DEGREES OF FREEDOM
Our initial approach was relatively cavalier. The containment and the arm all existed as a single ensemble. The containment was attached to the end of the arm (as the circular component which would also feature a net that is not shown here). The paddle, located in the middle of the arm would then knock the agents that were sitting on a platform into the net one by one. When approaching the zipline, an unlocking mechanism would split the containment from the rest of the arm, allowing the containment to detach itself. The main purpose of this was to faciliate two processes in one, so that the arm would both serve the purpose of collecting the agents and delivering them to the zipline. While ambitious, and at the same time, not ambitious, we found this design had two many degrees of freedom and was less tolerant to failures. It did not go any further than initial prototyping.
CHOPSTICK CONCEPTUALIZATION
The major benefits of this iteration over the previous one was the reduction in complexity. The chopstick implementation only required a single degree of freedom for the motion of the arm, as the arm had to simply grab the agent, and drop it backwards into the containment. This created a very restricted motion, as the arm was mechanically limited in how much freedom it had. The chopstick forks were also tuned to a shape that made retrieving the agents relatively simple, and their tolerance and mechanical freedom was also limited by a servo motor. The intention to pivot to this design came about three weeks into our six week design cycle, but we found that it would be beneficial for us in the long term.
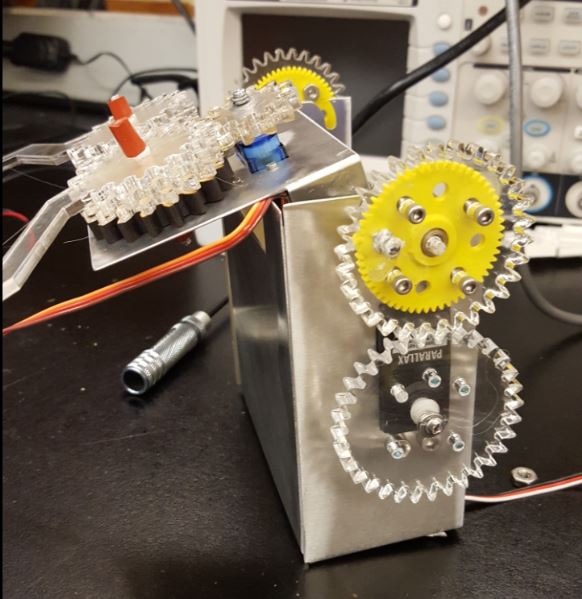
ALUMINUM IMPLEMENTATION
When implementing our chopstick concept, we originally used an aluminum casing, and acrylic arms. While the design seemed resistant to failures initially, there were areas that made quick advancement difficult. Namely, the design required that we were able to rigidly mate the shaft onto the arm in such a way where the arm would not rotate about the shaft. In practicality, this was difficult to achieve. Other oversights were our use of gear ratios. Initially, we utilized a 3:1 ratio between the servo motor and the rotating axis. We did not consider the fact that the gear ratio also limited the distance over which the servo motor travelled. We required 105 degrees (the servo travels 180), but the ratio reduced our maximum output to 60 degrees. Ultimately, however, we found that we did not need as high a safety factor on the torque as we had originally imagined, and we were able to faciliate our design with a 1:1 ratio.

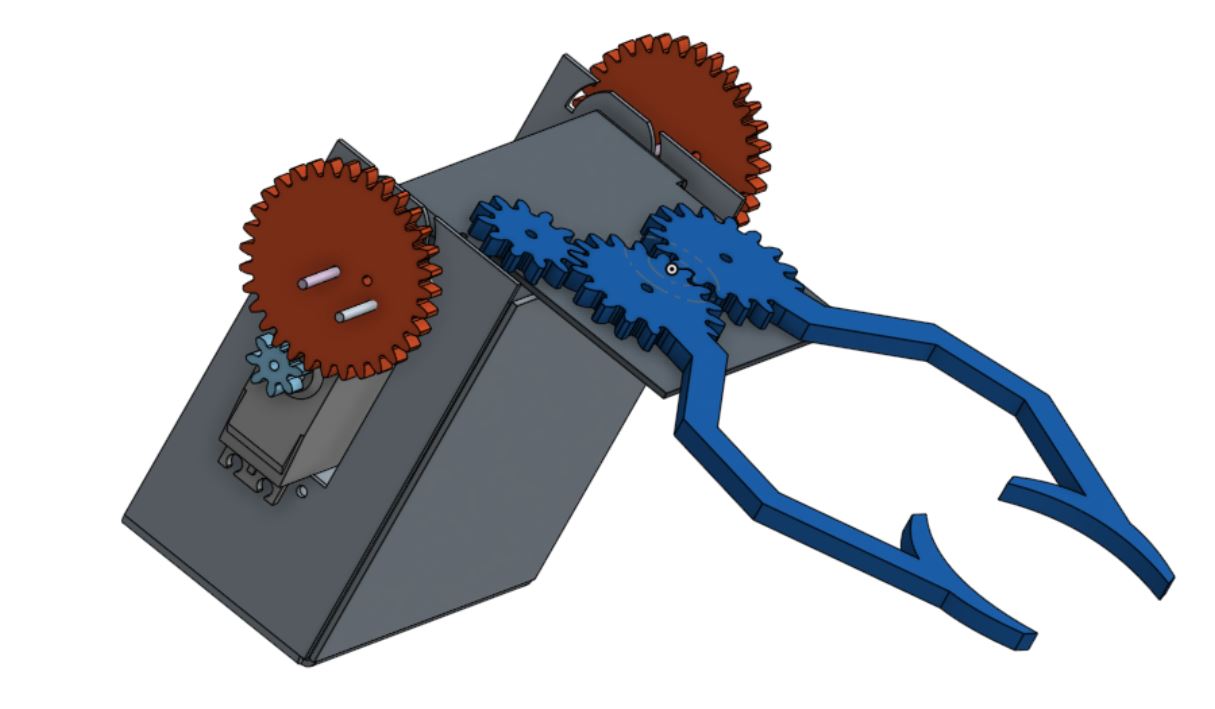
FINAL IMPLEMENTATION
In the final implementation, we were able to solve some of our shaft-collar mating issues by directly laser cutting an arm holder right onto a gear. We also opted to move away from aluminum/acrylic and towards hardboard/acrylic. Similar to the reasons we pivoted for the chassis, it made fabrication of the arm simpler, and we were able to utilize thicker materials. The overall design also made it compatible to combined geared sections with the arm base. The final design serves the main mandates of the design parameters we pivoted to in the middle of the design cycle. It operates with a single degree of freedom, using a servo motor to rotate the arm about an axis, allowing the agents to be dropped into a containment behind the arm. An additional servo motor is used, in conjunction with two gears to open and close the arm handles.